
Automation of Medical Vial Capping for Low to Medium Volume Applications

Time to Read: 4m 0s
 |
| Vials with crimped caps |
 |
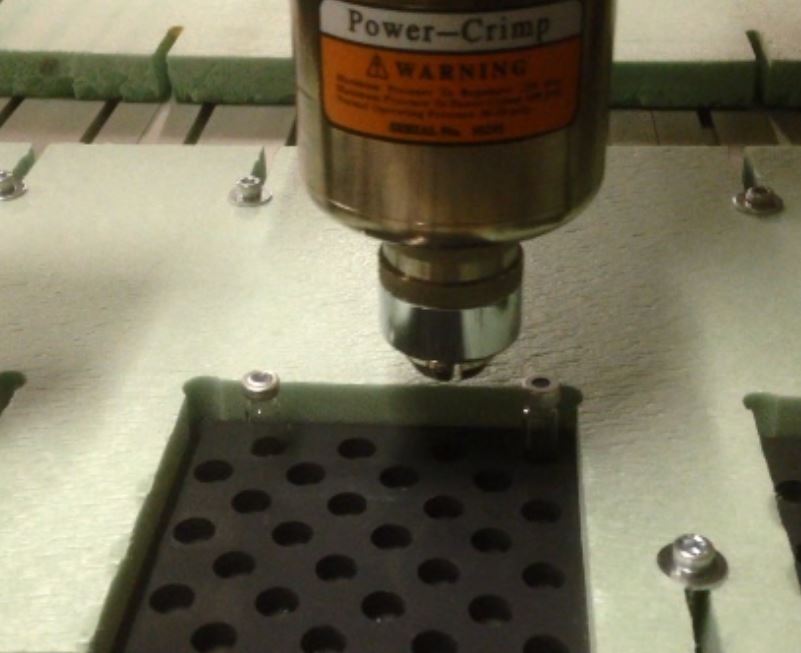
| Kebby Pneumatic Crimper with Interchangeable Crimping Heads (shown mounted on stand for manual application) |
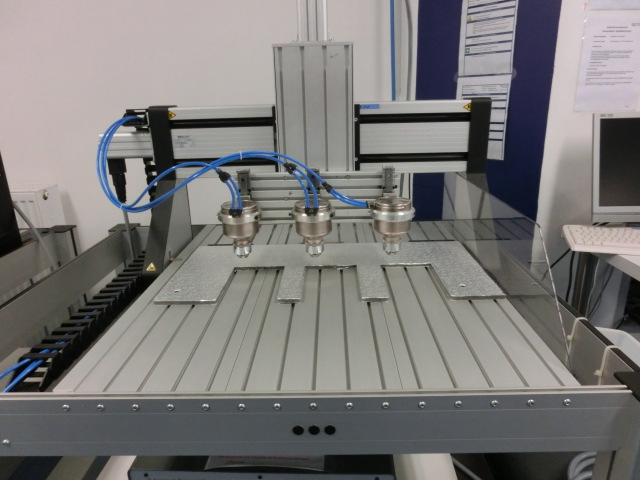 |
| 3 Kebby Pneumatic Crimpers on Isel Flatbed Gantry Robot |
A crimping head for low volume applications was found from a company called Kebby Industries in Chicago. This is a pneumatic device with replaceable crimping tools for different sized caps. Normally these crimp devices are used in a manual environment. Operators, using the Kebby crimping device, crimp 1 vial at a time with a pneumatically or manually activated crimping mechanism. Our client needed “thousands” not “hundreds” per day so we helped them automate the process. We supplied a simple XYZ flatbed style cartesian robot with a travel of approximately 20”x20”. We were able to mount 3 of the pneumatic crimp heads on the Z axis with the idea that 3 vials would be crimped simultaneously at each cycle. The vials need to be inserted all the way into the crimping device and we did not want the system to be sensitive to height adjustments. To remove the need for high precision adjustments, each of the 3 crimping devices was mounted on a vertical rail and bearing system with a short travel of about 2”. The crimpers rested on a dead stop at the bottom of the rail. The crimpers were positioned by the robot in the XY plane and then lowered on the Z axis. Because each crimper was floating in the Z axis along the rail, the Z was lowered far enough to ensure that all 3 vials about to be crimped were well seated in the crimp head. The weight of each crimper ensured that all 3 vials were engaged.
The vials were to be held in 3 hard plastic fixture plates. The plastic fixtures were held in a hard foam constraint. The foam constraint was used to allow a little compliance during the crimping process. The holes for the vials in the plastic fixtures were slightly oversized to allow the vials to be easily inserted and removed as well as to provide a little motion flexibility as the crimper crimped the caps. The crimpers were pneumatically separated and activated individually with separate solenoids in case not all 3 crimpers were to be used. This was no problem because of the number of inputs and outputs available on the controller.
The controller was a simple stepper motor controller. The application did not need high speed motions, especially since the crimping process took about 1 seconds. The hard plastic vial holders had the vial locations as close as possible relative to the size of the crimp head so the travel time between the crimps was kept to a minimum. The overall crimping process for 3 plastic trays took about 2-3 minutes.
The final system was an example of automation at its simplest. It consisted of:
- Flatbed XYZ Cartesian gantry with stepper motors
- 3 axis stepper motor controller
- 3 plastic vial trays
- 1 foam fixture for 3 vial trays
- Pneumatic manifold with 3 solenoid relays
- No additional I/O were needed since it was on the controller
- simple to assemble
- simple to maintain and service
- simple to program
- simple to run
The benefits of automating the process were
- Much higher throughput compared to manual crimping
- No operator fatigue
- 1 operator was able to run 2 or 3 automated crimp stations
- Crimper was consistently positioned for quality crimps
 |
| CLICK to see Kebby-Isel-Automated Crimper in Action |